Overview

The Space Taco Corgi Herself
|
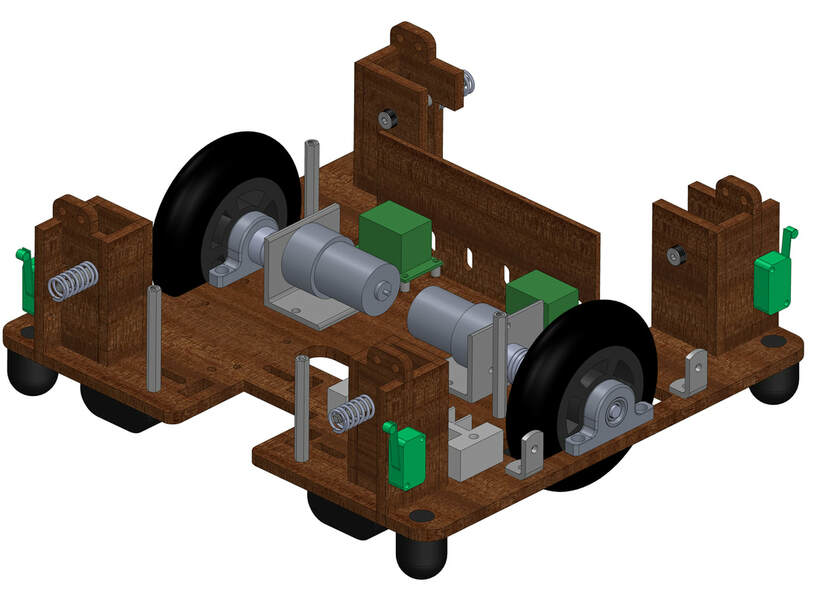
The Space-Taco-Corgi robot was designed with the goal of maximum ball collection in the random and chaotic environment known as the great pacific garbage patch. To achieve this goal, the primary objective was to create a ball collection mechanism which was reliable and had a large area, and also have storage space for a large number of balls. The drivetrain and bumper system were designed with the goal of impact protection as well as a high level of mechanical reliability. The driving constraint in this process was the limitation that the Corgi fit within a 1 foot cube (space travel shipping limitations).

|
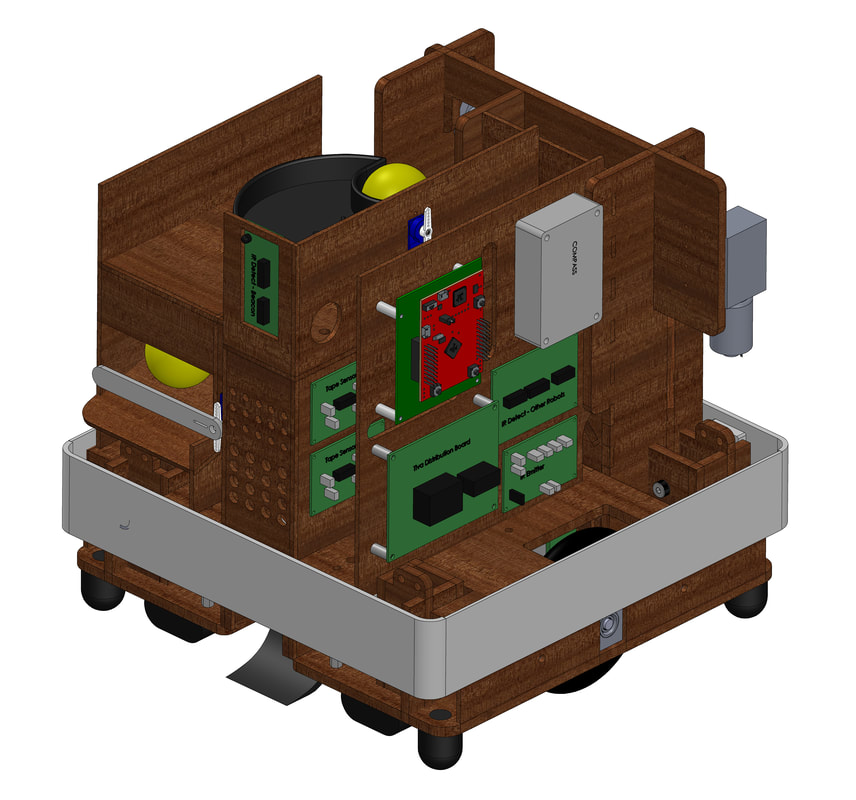
The Space Taco Corgi in Her CAD Form
Description of Subsystems
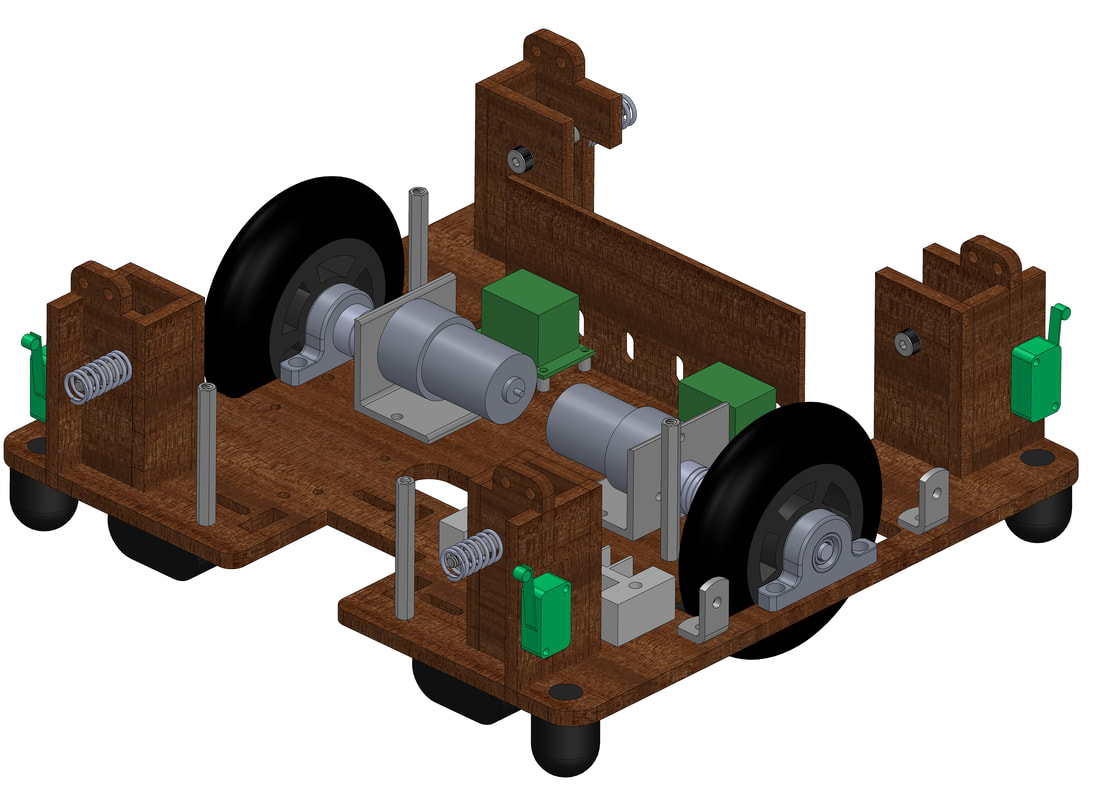
Drivetrain
The drivetrain used two independently driven wheels mounted in the center of the robot with sliders on all four corners for stability. The DC motors were mounted to custom manufactured aluminum brackets and the driveshaft was supported on both sides of the wheel to prevent side loads on the motors. The sliders were 3-D printed and glued into place to form a solid base and stable base for the robot.
|
Bumper
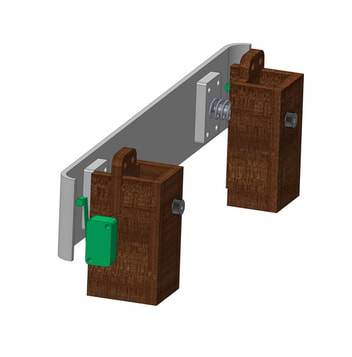
A spring bumper system was implemented in our design for the purpose of robot detection and to protect the robot from damage due to collisions. Collision detection was done through the use of four independent limit switches mounted at the ends of each of the two bumpers. The bumper towers were glued directly to the frame and shoulder bolts with springs were mounted to birch plywood bumpers. The impact absorption of the bumper was controlled by careful spring selection, allowing a safe collision while still reliably depressing the limit switches mounted behind the bumper.
|
|
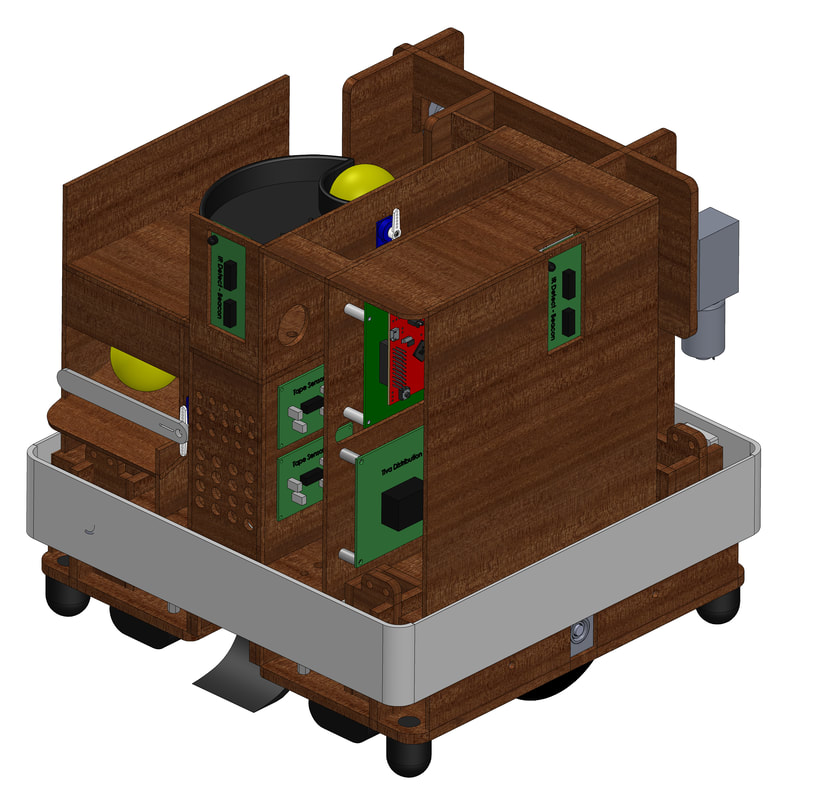
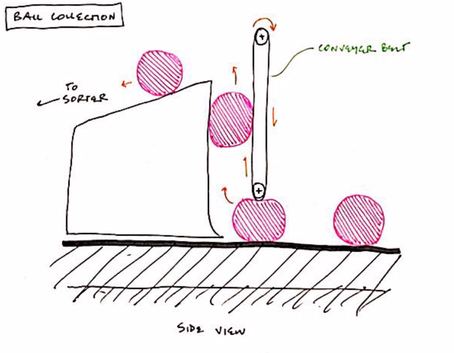
Ball Collection
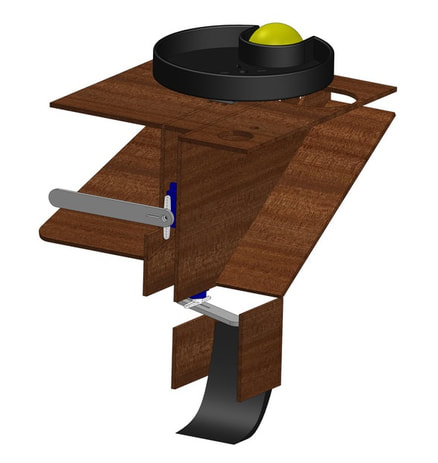
The ball collection mechanism is a belt driven by a DC worm gear motor. Due to the low cost, high strength, and excellent grip a 1000 grit sandpaper belt was used to collect balls. A 3D printed scoop is used to push balls from the ground up into the conveyor system. Balls are then rolled up the back wall by the belt and funneled to a single-file line upon exit. The conveyor was mounted to Duron slots so the tension and height of the belt could be controlled.

|
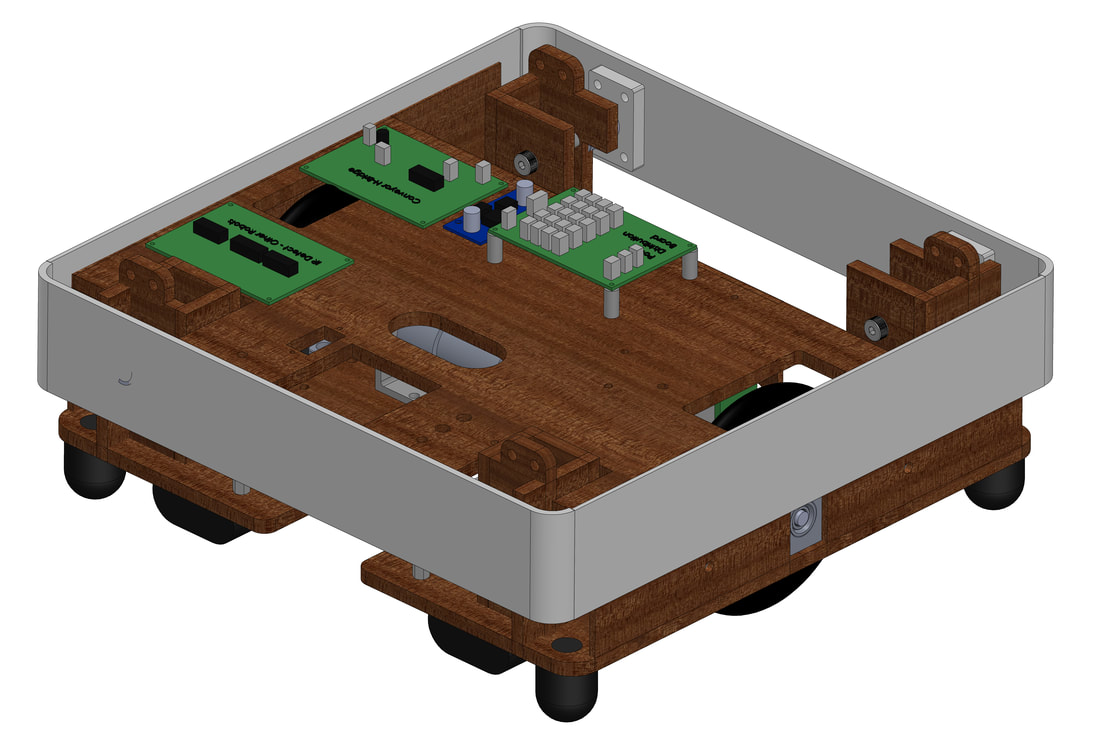
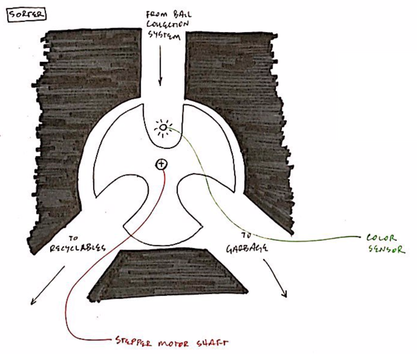
Ball Sorting
The ball sorting system was fed balls directly from the ball collection system. Balls are sorted using a color sensor and servo to rotate the disk, separating them into two storage containers based on ball color. One container, for the landfill can hold up to 8 balls, and the recycling center container holds up to 6 balls. Both containers are sloped with a servo-controlled gate, allowing for the containers to be emptied independently.

|
|
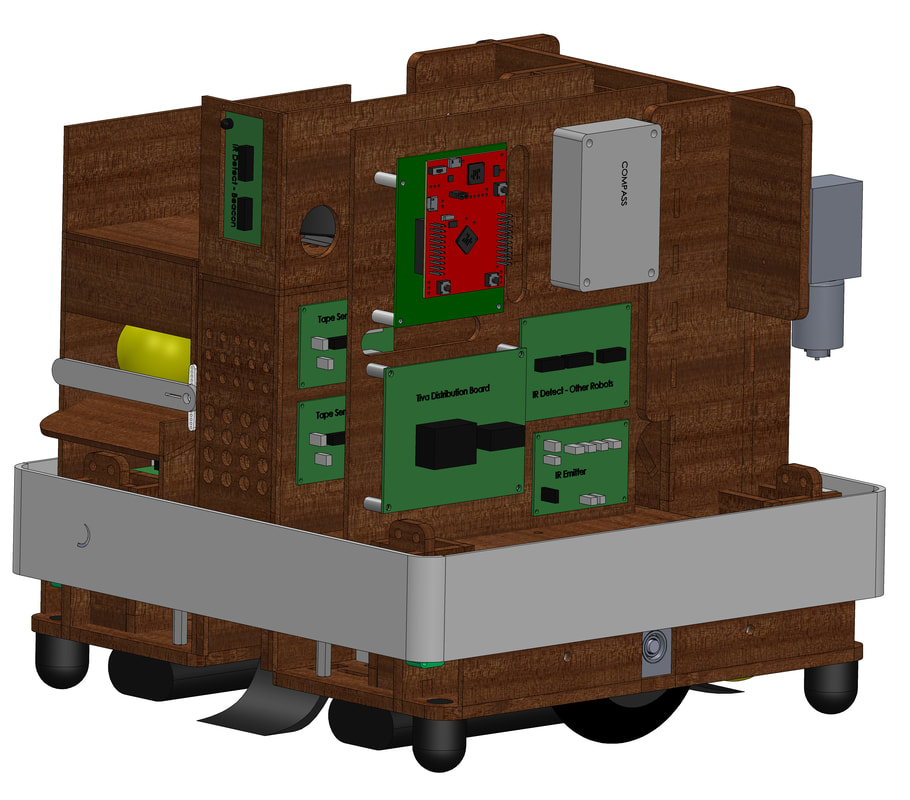
Electronics Panel
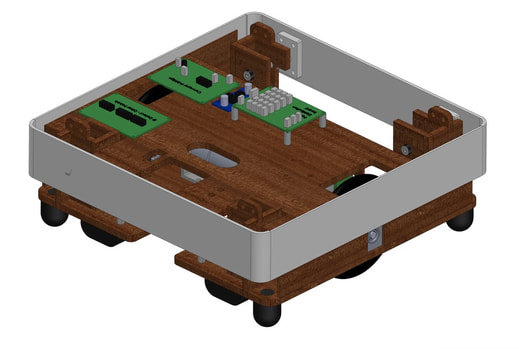
A removable panel was used in the robot design to allow for easy mounting and removal of the electronic components. More complex circuitry such as the TIVA and COMPASS boards were mounted near the outside for easy access, while more basic boards such as power distribution were mounted behind the removable board.

|
Robot Gallery



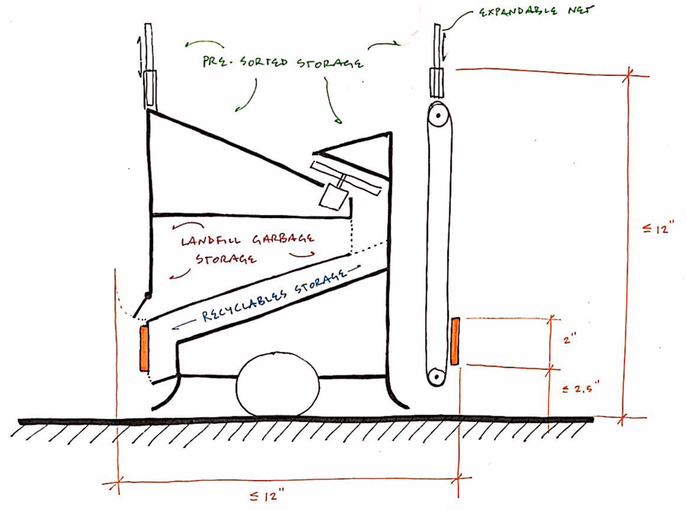
Preliminary Design
The early design of our system was a critical step in our project development process. During high level design and concept generation we settled on a design that used a conveyor to scoop balls, a rotating disk to sort the balls and separate bins for the recyclable and landfill GARBAGE pieces. This preliminary design can be seen in the hand-drawn sketches used to show final robot intent and overall layout. Due to this early planning, our robot was able to be implemented in a cohesive and elegant design.
|
|
|
